The utilization of robotic
manipulators for grasping objects on industrial conveyor lines has been
instrumental in advancing automation in transportation and logistics for
decades. Automating these processes enhances productivity, reduces costs, and
minimizes human intervention in continuous production settings.
With recent
advancements in artificial intelligence, researchers are actively applying
neural networks to robotic and industrial automation tasks [1]. One particularly challenging problem is
grasping moving objects, which requires high precision, adaptability, and rapid
response. Solving this problem is crucial for optimizing modern production
processes and increasing efficiency.
Neural
network-based robot control offers several advantages over traditional methods,
including learning from data, adaptability to new conditions, and handling
complex and dynamic scenarios. For instance, Pane et al. [2]
demonstrated that reinforcement learning algorithms can effectively
enhance the accuracy of manipulators by stabilizing various trajectories.
Traditional control
methods for manipulators, such as PID controllers and rigid algorithm-based
approaches, often lack the flexibility and efficiency necessary for handling
moving objects.
Sekkat et al. [3] showed that deep learning-based
algorithms, particularly DDPG combined with YOLO-based positioning, improve
manipulator performance in grasping tasks. Furthermore, Wang et al. [4] explored reinforcement learning techniques
for mobile manipulators using onboard sensors, integrating deep learning
algorithms with visual perception.
Tian et al. [5] introduced a digital twin-based approach
for trajectory planning, which was successfully applied in dynamic object
collection, such as fruit picking. Their method demonstrated significant
accuracy improvements over traditional techniques.
Naresh Marturi et
al. [6] proposed a method that
utilizes an inverse kinematics (IK) solver combined with task space error to
select the optimal grasping trajectory for moving objects in real time.
However, this approach relies on multiple fixed-position cameras, an RGB-D
camera mounted on the gripper, and a manually designed error function.
Iretiayo Akinola et
al. [7] introduced a method
that depends on a pre-generated graspable database (containing approximately
5,000 grasp candidates) and an RNN-based neural network model to predict object
motion trajectories for grasping.
In this study, we
propose a method that leverages the open‐source Stable
Baselines3 and PyBullet libraries to develop an accessible and reproducible
algorithm for the grasping of moving objects by a manipulator. The presented approach enables the development of an accessible
and reproducible algorithm for manipulator grasping of moving objects. Our
primary research goal is to leverage neural networks to improve a manipulator’s
ability to grasp objects moving along a conveyor belt, ensuring greater
accuracy and stability even under dynamic conditions. The key contributions of
this study include:
• We
employ reinforcement learning algorithms for autonomous manipulator control,
thereby eliminating the need for manually programmed trajectories.
• We
demonstrate the capability to grasp moving objects, a task significantly more
challenging than static object grasping
• We
conduct a quantitative analysis of various reinforcement learning algorithms,
with Proximal Policy Optimization (PPO) achieving the best results.
• We
achieve a 100% success rate in 1,000 random tests after 800 training episodes.
The system under study is a
7-degree-of-freedom (7DOF) Franka Emika Panda manipulator (see Figure 1). The
geometric center of the fixed support, which connects the manipulator’s base to
the table, coincides with the origin of the coordinate system used for modeling.
This configuration simplifies both trajectory calculation and motion control.
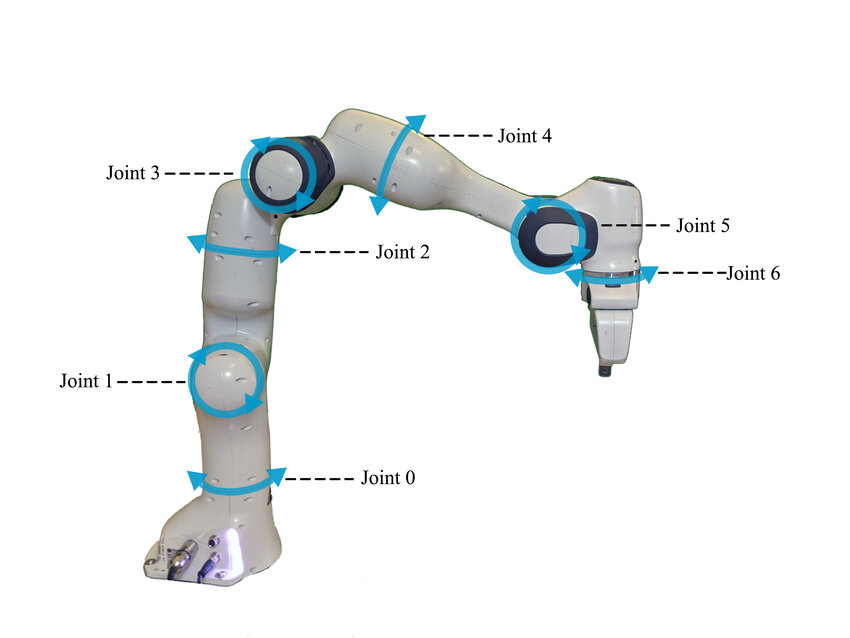
Fig. 1. Franka Emika Panda manipulator [8]
Each of the manipulator’s seven joints
has a specific range of rotation, ensuring high flexibility in task execution. The
gripper of the manipulator can open up to a maximum width of 8 cm. The process control strategy employs a stepwise approach, in which
the current joint positions determine minimal angular changes in the subsequent
step, thereby ensuring smooth motion and minimal errors during complex manipulations.
The task involves a cylindrical object
(diameter = 0.04 m, height = 0.17 m) that moves uniformly on a conveyor belt at
a speed of approximately 3–5 meters per minute. The
manipulator is required to grasp the target within the specified area P (0.7 m
× 0.3 m) and within a time window of T = 14 seconds, while ensuring no
contact is made with either the object or the conveyor belt.
PyBullet is a popular open-source physics
engine that includes built-in models of various modern robots, manipulators,
and other devices. It also supports loading models in formats such as URDF
(Unified Robot Description Format), SDF (Simulation Description Format), and
MJCF (MuJoCo XML Format). The engine is designed to simplify the transition
from basic to realistic modeling, thereby facilitating convenient simulations
of kinematics, optics, collision detection, and other processes. PyBullet is
suitable for a wide range of robotic modeling and machine learning tasks.
In PyBullet, the simulation environment and
target object are modeled (see Figure 2), where the arrow indicates the
direction of the target's movement.
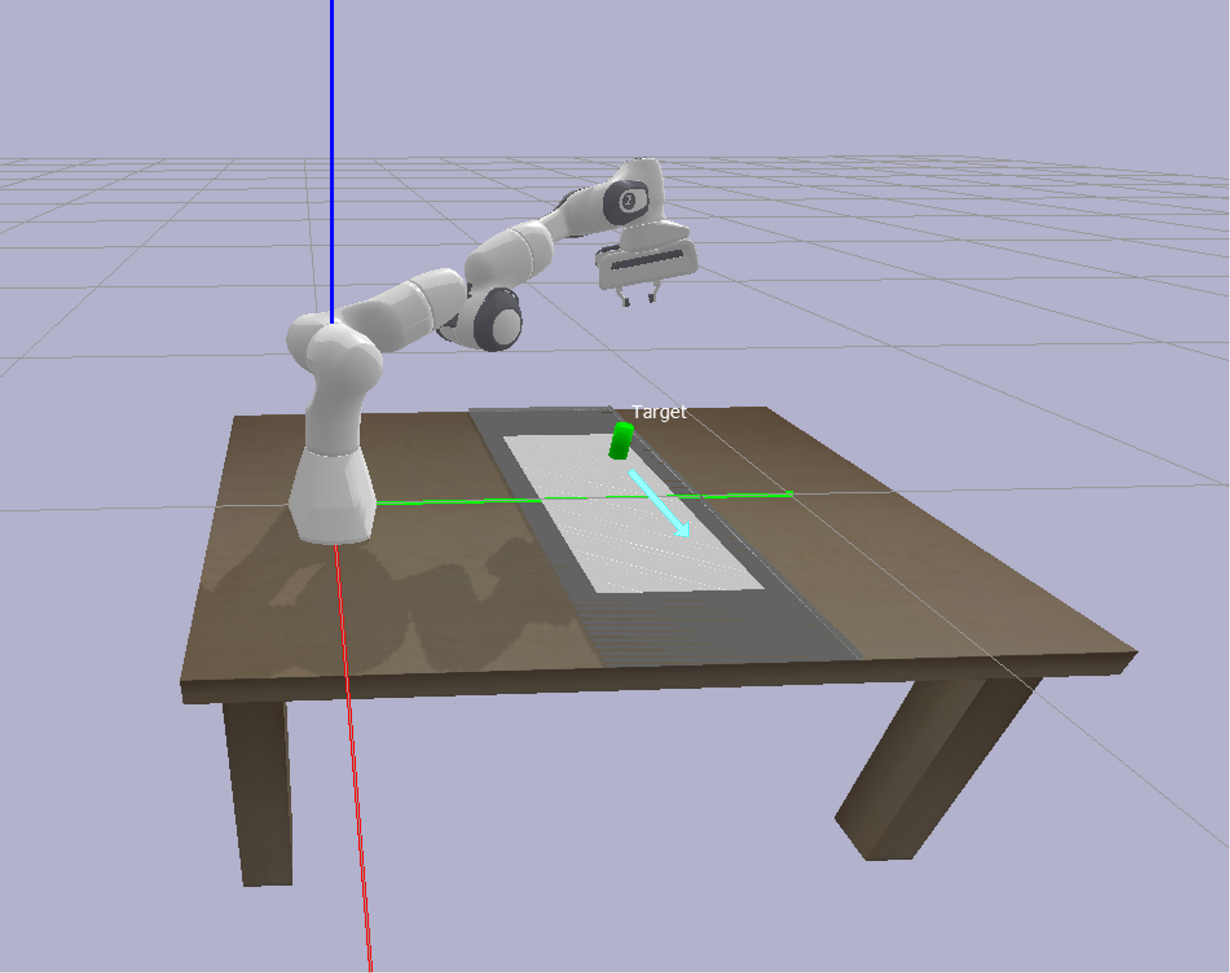
Fig. 2. Simulation environment of the task in PyBullet
To address the aforementioned challenges, we
first determine the position of the moving object using RGB-D camera data while
simultaneously evaluating the impact of image processing latency on measurement
accuracy. Subsequently, we develop a reinforcement learning pipeline for
robotic arm grasping.
A mask is created by distinguishing between
the foreground and background on the conveyor belt.
A segmentation network is utilized to extract the pixel coordinates
(u, v) of the target along with its corresponding depth value, d.
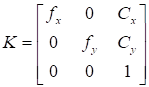
The intrinsic parameters of the camera are
encapsulated in the matrix K, defined as follows:
|
|
(1)
|
Where:
 ,
,
 — focal length of the
camera (in pixels), calculated based on the known field of view angle (FOV);
— focal length of the
camera (in pixels), calculated based on the known field of view angle (FOV);
 ,
,
 — position of the camera’s
optical center (typically the image center).
— position of the camera’s
optical center (typically the image center).
The transformation
of pixel coordinates (u, v) into camera coordinates P_cam:
( ,
,
 ,
,
 )
is as follows:
)
is as follows:
|

|
(2)
|
Where:
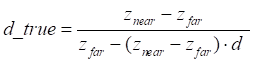
where d represents the depth acquired from the RGB-D
camera. The normalized depth value d_true is denormalized as follows:
|
|
(3)
|
Where:
 — known parameter, the
minimum visible distance for the camera.;
— known parameter, the
minimum visible distance for the camera.;
 — known parameter, the
maximum visible distance for the camera;
— known parameter, the
maximum visible distance for the camera;
 — known parameter, the
normalized depth value.
— known parameter, the
normalized depth value.
Next, the extrinsic parameter matrix E is introduced, which transforms points from
the camera coordinate system to the world coordinate system. It is defined as:
|
|
(4)
|
Where:
t: Translation vector (known parameter), representing the camera’s position
in the world coordinate system, and R is the
rotation matrix describing the orientation of the camera coordinate system
relative to the world coordinate system.
|
|
(5)
|
Where:
Forward
=
 ,
,
 ,
,
 - coordinates of the camera’s focus
position and camera position.
- coordinates of the camera’s focus
position and camera position.
Right
=
 ,
rightward direction
of the camera’s orientation toward the focus point.
,
rightward direction
of the camera’s orientation toward the focus point.
Up: The upward direction is computed as

Finally, points in
the camera coordinate system are transformed into the world coordinate system
using the extrinsic parameter matrix.
 using the extrinsic
parameter matrix and data from RGB-D:
using the extrinsic
parameter matrix and data from RGB-D:
|

|
(6)
|
The entire
process—from image acquisition to the completion of all calculations—requires
approximately 50 ms on a standard computer (CPU: Intel Core i7-11800H, GPU:
NVIDIA RTX 3060), and errors due to computational delays:

Note that
computational delays introduce errors, which increase with the instantaneous
speed of the moving object. For instance, if an object moves at 4 m/s, the
positional error may exceed 20 cm. Consequently, both our research and related
studies focus on lower speeds (approximately 3–5 m/min). Given that the target
objects measure about 4 cm in size, the resulting error remains within
acceptable limits for successful capture.
Training a robot to
successfully grasp a moving object is a challenging task. Initially, the
robot’s actions are largely random—it may attempt to grasp too early, too late,
or even cause collisions and other unintended outcomes. During training, every
attempt is carefully observed, and the system provides targeted feedback via a
reward function. For instance, if the robot reaches too early, the feedback
might be: “This time you reached too early; next time, try to get a little
closer.” This process embodies the core principle of reinforcement learning,
whereby continuous trial-and-error, combined with systematic feedback, enables
the robotic arm to refine its actions for more efficient grasping of moving
objects.
The core components of the reinforcement learning environment include:
Agent (Robot): The manipulator interacting with the environment.
Environment: The simulation setup (implemented in
PyBullet as detailed in Section 2).
State: Defined by the observation space.
Action: Defined by the action space.
Reward: A feedback function guiding the learning
process.
In our task, the observation space S is represented by a
13-dimensional vector, capturing both the manipulator’s joint angles and
additional sensory inputs.:

Similarly, the action space A is defined as a
7-dimensional vector corresponding to the manipulator’s degrees of freedom.
Here, the components θ in S denote the current joint angles, while
Δθ in A represent the incremental adjustments to be applied.:

These dimensions
correspond to the manipulator’s degrees of freedom and sensory inputs
( in S are the current joint angles of the robotic manipulator, and
in S are the current joint angles of the robotic manipulator, and
 in A mean the next time to move).
in A mean the next time to move).
The training of the
neural network involves the following stages:
Step 1. Parameter Initialization: The manipulator is moved to its initial
position, and the object is introduced at a random location within the
workspace.
Step 2. Observation and Action: The current state
 ,
is fed as input to the network, which then outputs the adjustment
,
is fed as input to the network, which then outputs the adjustment
 for the joint angles.
for the joint angles.
Step 3. State Update: After executing the action, the new state
 is recorded as the object moves along the conveyor belt.
is recorded as the object moves along the conveyor belt.
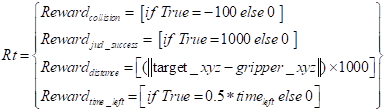
Step 4. Reward: The network receives a reward
 for successfully
completing the grasping task, or a penalty if it deviates from the target. The
reward components include:
for successfully
completing the grasping task, or a penalty if it deviates from the target. The
reward components include:
|
|
(7)
|
 — A penalty for collisions, guiding the manipulator to avoid impacts;
— A penalty for collisions, guiding the manipulator to avoid impacts;
 — An
additional reward for task completion;
— An
additional reward for task completion;
 — A
reward that encourages the gripper to approach the target;
— A
reward that encourages the gripper to approach the target;
 — A
reward based on the remaining time after task completion, promoting faster
execution.
— A
reward based on the remaining time after task completion, promoting faster
execution.
Step 5. Parameter adjustment: Network parameters are updated to minimize
error.
Step 6. Repeat Steps 1–5 until convergence.
The task is deemed
successful if the manipulator’s grasping action locates the object within an
error margin of 2 cm and no safety constraints are violated (e.g., no
collisions with the conveyor). In our implementation, various reinforcement
learning algorithms provided by the Stable Baselines3 library were evaluated—such
as DDPG (Deep Deterministic Policy Gradient) [9], TD3 (Twin Delayed Deep Deterministic
Policy Gradient) [10], SAC
(Soft Actor-Critic) [11], and
PPO (Proximal Policy Optimization) [12]. Each algorithm offers distinct
advantages for continuous control tasks:
DDPG: Utilizes deterministic policy gradients for smooth control.
TD3: Enhances DDPG by mitigating overestimation errors via twin delayed updates.
SAC: Incorporates an entropy term to foster exploration.
PPO: Employs a clipped objective function to maintain stable learning.
Due to space limitations, a detailed discussion is omitted; readers
are referred to [9]–[12] for further details.
The system operation diagram is shown in Figure 3.
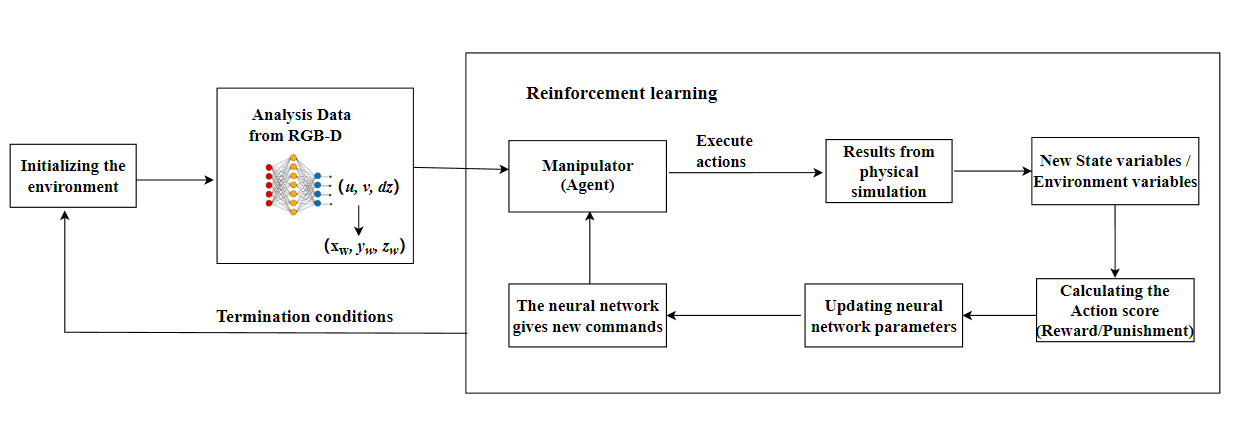
Fig. 3. Scheme of operation of the robot control system in the
simulation environment
Based on the
aforementioned process, we have established a deep reinforcement learning
framework to perform the task. However, it is essential to integrate the
physical modeling with the task dynamics into a unified learning environment
that can be seamlessly processed by the algorithms. Gymnasium is an open-source framework designed to standardize and
integrate various reinforcement learning environments. We modified the Gymnasium framework to integrate both the physical
modeling and the learning process into a single environment (see Fig. 2).
Further details about Gymnasium can be found in [13].
We conducted
experiments over 800 episodes on a general-purpose computer powered by an Intel
Core i7-11800H CPU. Each episode consists of 30 million time steps. To evaluate the proposed neural
network-based manipulator control method, we implemented and tested four
popular reinforcement learning algorithms—DDPG, TD3, SAC, and PPO.

Fig. 4. Success rate of different algorithms for iterations
As illustrated in Figure 4, the following observations can be made:
PPO achieves a high success rate, with the range of episodes reaching 100% success
widening as training time increases.
SAC and TD3 exhibit moderate
performance, maintaining a success rate of approximately 50%.
DDPG performs the worst, with success rates remaining below 10%.
Figure 5
illustrates the performance of the various algorithms under random testing
conditions.
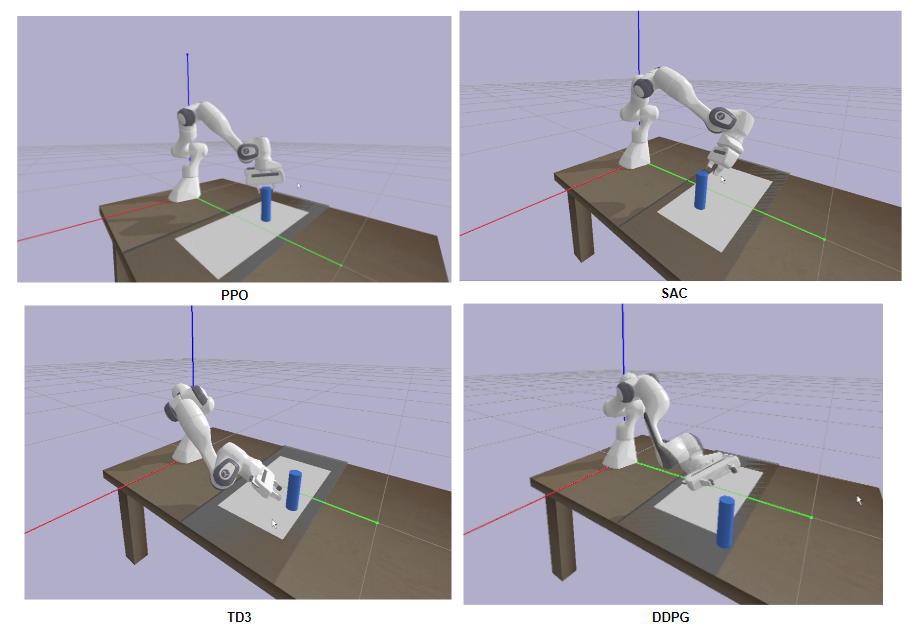
Fig. 5. Results of different algorithms in random test
Real-time
recordings of the experiments are available for viewing or download at: https://disk.yandex.ru/i/cXR4msWAKiwj0w.
We summarize the
results for different algorithms in Table 1. The higher the average reward, the
faster the capture task is completed and the better the overall performance.
Analyzing the data from Table 1, we can conclude that the PPO algorithm shows
better results in terms of training time and task completion success compared
to other algorithms.
Table 1 — Comparison of performance of different algorithms
|
Algorithms
|
Reference
indicators
|
|
Neural
network inference speed(ms)
|
Average time
steps
|
Success rate
in 1000 times
(%)
|
Average
Reward
Rt
|
Time
of training (hhmm)
|
|
DDPG
|
<2
|
213.8
|
3.1
|
660.5
|
9h15m
|
|
TD3
|
<2
|
164.1
|
36.3
|
1188.6
|
8h51m
|
|
SAC
|
<2
|
269.1
|
68.1
|
1397.2
|
9h21m
|
|
PPO
|
<2
|
120.5
|
100
|
2239.9
|
3h39m
|
This article
presents an approach that employs neural networks and reinforcement
learning—implemented using the open-source library Stable Baselines3—to address
the challenge of a manipulator capturing objects moving uniformly on a conveyor
bel. In our study, the target objects were abstracted
as cylinders, and the method was validated using a virtual physical simulation
platform, thereby confirming its applicability and effectiveness. We employed several popular reinforcement
learning algorithms, including PPO, DDPG, SAC, and TD3, and provided a detailed
description of the steps necessary to solve this task using open-source neural
network models. The results
obtained in this study provide a solid foundation for further research and
offer a valuable starting point for other researchers interested in similar
tasks. Future research directions may include investigating the use of mobile
robots for capturing moving targets.
The present work was partially supported by the China Scholarship
Council (CSC) №202108090230.
1. Shuzhi, S. G., Hang, C. C., & Woon, L. C. Adaptive neural network control of robot manipulators in task space // IEEE transactions on industrial electronics, 44(6), 1997,pp.746-752.
2. Pane, Y. P., Nageshrao, S. P., Kober, J., & Babuska, R. (2019). Reinforcement learning based compensation methods for robot manipulators // Engineering Applications of Artificial Intelligence, 78, 2019, pp.236-247.
(doi: 10.1016/j.engappai.2018.11.006) (https://doi.org/10.1016/j.engappai.2018.11.006)
3. Sekkat, H., Tigani, S., Saadane, R., & Chehri, A. Vision-based robotic arm control algorithm using deep reinforcement learning for autonomous objects grasping // Applied Sciences, 11(17), 2021,p.7917.(doi:10.3390/app11177917) (https://doi.org/10.3390/app11177917)
4. Wang, C., Zhang, Q., Tian, Q., Li, S., Wang, X., Lane, D., & Wang, S. Learning mobile manipulation through deep reinforcement learning // Sensors, 20(3), 2020,939. (doi:10.3390/s20030939) (https://doi.org/10.3390/s20030939)
5. Tian, X., Pan, B., Bai, L., Wang, G., & Mo, D. Fruit Picking Robot Arm Training Solution Based on Reinforcement Learning in Digital Twin // Journal of ICT Standardization, 11(3), 2023, pp.261-282.
(doi:10.13052/jicts2245-800x.1133) (https://doi.org/10.13052/jicts2245-800x.1133 )
6. Marturi, N., Kopicki, M., Rastegarpanah, A., Rajasekaran, V., Adjigble, M., Stolkin, R., ... & Bekiroglu, Y. Dynamic grasp and trajectory planning for moving objects // Autonomous Robots, 43, 2019, pp. 1241-1256.
(doi:10.1007/s10514-018-9799-1) (https://doi.org/10.1007/s10514-018-9799-1)
7. Akinola, I., Xu, J., Song, S., & Allen, P. K. Dynamic grasping with reachability and motion awareness // IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2021, pp. 9422-9429.
(doi:10.48550/arXiv.2103.10562) (https://doi.org/10.48550/arXiv.2103.10562)
8. Reed, A., Albin, D., Pasricha, A., Roncone, A., & Heckman, C. Transformer-based Learning Models of Dynamical Systems for Robotic State Prediction., 2024, (doi:10.21203/rs.3.rs-3919154/v1) (https://doi.org/10.21203/rs.3.rs-3919154/v1)
9. Lillicrap, T. P. Continuous control with deep reinforcement learning // arXiv preprint, 2015, (doi:10.48550/arXiv.1509.02971) (https://doi.org/10.48550/arXiv.1509.02971)
10. Fujimoto, S., Hoof, H., & Meger, D. Addressing function approximation error in actor-critic methods // International conference on machine learning, PMLR, 2018, pp. 1587-1596. (doi:10.48550/arXiv.1802.09477) (https://doi.org/10.48550/arXiv.1802.09477)
11. Haarnoja, T., Zhou, A., Abbeel, P., & Levine, S. Soft actor-critic: Off-policy maximum entropy deep reinforcement learning with a stochastic actor // International conference on machine learning, PMLR, 2018, pp. 1861-1870. (doi:10.48550/arXiv.1801.01290) (https://doi.org/10.48550/arXiv.1801.01290)
12. Schulman, J., Wolski, F., Dhariwal, P., Radford, A., & Klimov, O. Proximal policy optimization algorithms // arXiv preprint, 2017 (doi:10.48550/arXiv.1707.06347) (https://doi.org/10.48550/arXiv.1707.06347)
13. Towers, M., Kwiatkowski, A., Terry, J., Balis, J. U., De Cola, G., Deleu, T., ... & Younis, O. G. Gymnasium: A standard interface for reinforcement learning environments. arXiv preprint, 2024, (doi:10.48550/arXiv.2407.17032) (https://doi.org/10.48550/arXiv.2407.17032)
